
www.auto-innovaciones.com
12
'22
Written on Modified on
ONSEMI News
Retos del tratamiento avanzado de imágenes en el automóvil
A medida que los vehículos evolucionan de ser controlados por el conductor y de contar con sistemas avanzados de ayuda a la conducción (ADAS - Advanced Driver Assistance Systems) hacia la conducción totalmente autónoma, el rendimiento de los sensores de imagen se hace aún más relevante. Esto se cumple en especial con las cámaras que detectan el entorno circundante para proteger a todos los usuarios de la vía pública.
Las condiciones de circulación se complican cuando hay poca iluminación o las altas temperaturas afectan al rendimiento del sensor. Por definición, los sensores de imagen deben proporcionar un excelente rendimiento bajo todas las condiciones para la conducción autónoma.
Este artículo técnico examina cómo evolucionan los sensores de imagen para afrontar el reto de la conducción autónoma con la tecnología más avanzada para ofrecer el rendimiento que exige el sector al precio que se necesita.
Los vehículos están pasando de ser controlados por completo por el conductor a ofrecerle asistencia y, en última instancia, a una conducción totalmente autónoma, por lo que necesitan detectar el espacio circundante. Si bien los vehículos pueden recurrir a diferentes tipos de sensores, los sensores de imagen se encuentran entre los más versátiles y populares gracias a su capacidad única para capturar formas, texturas y colores con un coste relativamente bajo.
La instalación de sensores de imagen en el entorno del automóvil entraña muchas dificultades. Las condiciones de iluminación pueden dar lugar a niveles extremos de contraste, y el reflejo ocasionado por las carreteras mojadas y las condiciones meteorológicas como la lluvia, la niebla y la nieve pueden afectar a la visibilidad. Los semáforos, las señales de tráfico y las luces de los vehículos suelen utilizar LED. Una gran ventaja de los LED es que son muy eficientes; sin embargo, está iluminación suele estar formada por impulsos. Aunque el ojo humano no puede verlo, el sensor de imagen la mostrará como un flujo de imágenes parpadeantes.
Una de las principales funciones de la visión en el automóvil es detectar objetos en la ruta del vehículo. Cuanta mayor sea la distancia a la que se pueda ver un objeto, más tiempo tendrá el vehículo para tomar una decisión y reaccionar. Por eso se necesita una alta resolución y una alta calidad de imagen para discernir objetos a distancia.
El coste es primordial a medida que se instalan más sensores de imagen por sistema; no solo para ver por delante sino también para proporcionar una vista de 360 grados y monitorizar el habitáculo. Algunos coches tienen más de una docena de cámaras.
Reducir el tamaño del píxel ofrece un importante ahorro de coste.
De la asistencia a la automatización
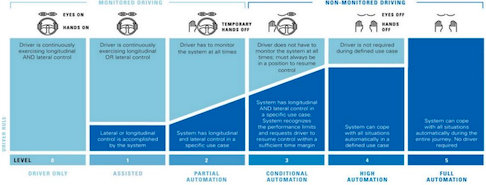
La American Society of Automotive Engineers (SAE) ha definido un modelo con seis niveles que muestra el progreso desde los vehículos sin inteligencia hasta los vehículos totalmente automáticos bajo todas las condiciones de conducción
Actualmente muchos vehículos son capaces de funcionar a Nivel 2, que incluye el control más básico, como corregir la salida del carril en la autopista. La transición al Nivel 3 es importante ya que el Nivel 3 tiene un control más automático del movimiento del vehículo. Para ello los sensores de imagen necesitarán ofrecer una resolución de 8 megapíxeles (MP), es decir, cuatro veces más que los utilizados habitualmente en la actualidad. Esto será suficiente para algunas operaciones autónomas en ciertas situaciones, como circular por la autopista. Para pasar al Nivel 4 y el Nivel 5, la resolución de los sensores de imagen deberá ser mucho mayor de manera que permitan un funcionamiento autónomo en todas las situaciones.
De forma similar, la detección del espacio circundante y las cámaras de ángulos muertos también incrementan la resolución a 3 MP o incluso 8 MP, dependiendo de su uso, e incorporan atenuación del parpadeo de los LED y un alto rango dinámico (high dynamic range, HDR).
Además, los filtros distintos a los Bayer han ido sustituyendo cada vez más a las matrices Bayer de filtros de colores (color filter arrays, CFA) con el fin de mejorar el funcionamiento con poca luz y seguir ofreciendo unas buenas prestaciones cromáticas.
Tamaños del píxel
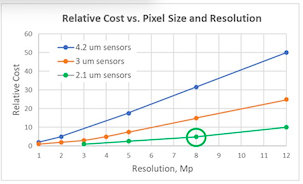
Incrementar la resolución de los sensores aumenta de manera significativa el coste si el tamaño del píxel sigue siendo el mismo, actualmente entre 4,2 µm y 3 µm. No obstante, reducir el tamaño del píxel a 2.1 µm permitirá reducir significativamente el coste de un sensor de 8 MP, por lo que un sensor de 8 MP con píxels de 2,1 µm tendrá un coste mucho más bajo que un sensor de 8 MP con píxels de 4,2 µm o 3 µm. La Figura 2 ofrece una comparación de costes.
Se podría pensar que, como resultado de ello, se verían perjudicados otros parámetros críticos del rendimiento como el funcionamiento con poca luz, la relación señal /ruido (SNR) o el HDR. Sin embargo, no es así. Los parámetros que indican el rendimiento con poca luz (SNR1 y SNR3) de los sensores de onsemi con 3,75 µm, 3 µm y 2,1 µm píxels son bastante similares. La SNR y el HDR de los nuevos sensores de imagen de onsemi con píxels de 2,1 µm superan a los sensores de imagen con píxels de 3 µm . La Figura 3 compara los parámetros de SNR1 y SNR3.
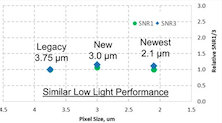
Reducir los tamaños del píxel no afecta al rendimiento con poca luz.
Además, si se comparan con los sensores de 3,0 µm y 3 MP o 5 MP de otro fabricante, la solución con el sensor de 2,1 µm y 8 MP de onsemi mejora la distancia de detección con un coste similar o inferior.
En el difícil ejemplo de detectar una roca por la noche cuando es iluminada solo por los faros delanteros, los sensores de 3 µm y 3 MP o 5 MP lograron unas distancias de detección de 125 m y 150 m, respectivamente. En cambio el sensor de onsemi llegó a 170 m (Figura 4). Esta distancia añadida equivale a más tiempo de reacción y contribuye significativamente a aumentar la seguridad.
Calidad de la imagen y temperaturas más altas del automóvil
Cambiar los filtros de color de Bayer a RYYCy o RCCB e incorporar un canal cromático HDR de alta calidad como Clarity+ mejora significativamente el rendimiento del sensor y la calidad de imagen. Los patrones de los filtros de color distintos a los Bayer permiten la introducción de más fotones en cada píxel, mejorando así el rendimiento con poca luz. Gracias a ello el sensor “ve” mejor cuando las condiciones son adversas, así como generar capturas en bruto del color exacto y procesarlas en imágenes de alta calidad.
La SNR es un parámetro importante para todos los sensores de imagen ya que está relacionada con la capacidad del sistema de detectar objetos dentro de las imágenes generadas por el sensor. A altas temperaturas, un sensor de diodo dividido de 3 µm suele experimentar una caída de la SNR de unos 20 dB. El ruido es claramente visible a este nivel y la detección del objeto es más difícil. Un sensor comparable de onsemi alcanza unos niveles de SNR superiores a 30 dB. A este nivel el ruido es significativamente menor y la detección del objeto resulta mucho más sencilla, por lo que la imagen resultante es mucho más agradable a la vista en en las aplicaciones donde se muestran imágenes al usuario.
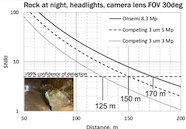
El sensor de 8,3 MP de onsemi detecta objetos a mucha más distancia que los sensores de 3 µm de sus competidores.
La temperatura siempre es difícil de manejar para los sensores de imagen y puede degradar de forma notable la calidad de la imagen y del rendimiento. Esto ocurre especialmente en las aplicaciones del automóvil donde los sensores funcionan con temperaturas de unión elevadas de 80°C o superiores durante más del 80% de su vida útil debido a que se han instalado bajo la luz directa del sol y se han diseñado en pequeños espacios cerrados junto con otros dispositivos electrónicos que generan calor al funcionar.
Incluso con temperaturas de unión de 125°C los sensores de imagen de onsemi con un tamaño del píxel de 2,1 µm pueden lograr una SNR por encima de 25 dB con media o mucha luz, garantizando de este modo la detección exacta de objetos bajo todas las condiciones de funcionamiento.
Un moderno sensor de imagen HDR LFM de 2,1 µm para al automóviI
El sensor de imagen más reciente de onsemi para el automóvil ofrece una resolución de 3840 x 2160 (8,3 MP) con píxeles de super-exposición de 2,1 µm de nueva generación. Este sensor incorpora la tecnología de píxel LFM (LED flicker mitigation), que genera imágenes con un HDR de hasta 155 dB y supera los 110 dB sin parpadeo. Puede alcanzar una velocidad de HDR de hasta 60 fps y reducirla a 45 fps para incrementar el HDR de 110 dB a más de 145 dB.
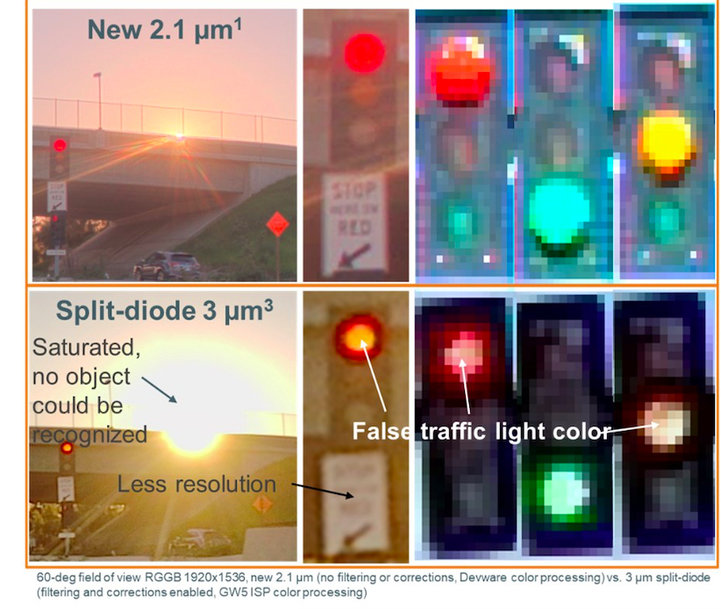
Comparación entre la calidad de imagen de un sensor de 2,1 µm de onsemi (izq.) y un sensor de 3 µm de un competidor (dcha.), recortado.
Por lo que respecta al rendimiento con poca luz, el rendimiento del sensor de 2,1 µm es comparable o mejor que el ofrecido por los mejores sensores de 3 µm. La Figura 5 muestra la diferencia en la calidad de imagen del HDR entre el sensor de 2,1 µm y el sensor de 3 µm del competidor.
Destaca su rango dinámico mucho mejor, la captura de más detalles y el color verdadero del semáforo. Los SNR de transición superan los 30 dB a temperaturas de unión (Tj) de hasta 100°C, e incluso a temperaturas extremas (Tj=125°C) los valores de SNR están por encima de 25 dB. Bajo todas las condiciones, el sensor proporciona imágenes nítidas con una alta fidelidad del color debido, en parte, a las CFA de tecnologías Bayer y distintas a Bayer ofrecidas: RGGB, RCCB, RCCG y RYYCy.
www.onsemi.com
